Hyperparameters
# Dataset
SEQ_LENGTH = 5
NUM_SAMPLES = 2000
# Model
ITEM_SIZE = 1
EMBEDDING_SIZE = 32
HIDDEN_SIZE = 32
BATCH_SIZE = 256
PROCESS_STEPS = 5 # RPW model
# Training
LR = 0.01
N_EPOCHS = 250Sequence-to-sequence (Seq-to-Seq) models are a common solution for tasks with a natural sequential structure, such as translating sentences into another language (Sutskever, Vinyals, and Le 2014). These models are particularly useful because they can handle variable-length inputs and outputs. But what happens when the underlying task has no order?
Sorting a set of numbers is a good example, which we explore in this article. Here, a Seq-to-Seq model would not work optimally because the order of the numbers in the input data could affect the result (Vinyals, Bengio, and Kudlur 2015). This highlights the limitations of Seq-to-Seq when it comes to processing sets rather than sequences.
In the following sections, we will explore how to develop an architecture that can handle such Set-to-Set tasks. The implementations presented are based on theory from several scientific papers, including concepts such as attention (Graves, Wayne, and Danihelka 2014), pointer networks (Vinyals, Fortunato, and Jaitly 2015), and the Read-Process-Write architecture (Vinyals, Bengio, and Kudlur 2015).
In order to understand the following content, we assume basic knowledge of neural networks, backpropagation and Seq-to-Seq models. We will rely on the PyTorch library for the implementation. We have provided further literature for each approach. This can be used both to deepen your knowledge and to go deeper into a topic if you are having difficulty understanding it.
As a benchmark for the models in this experiment, we will conduct a number-sorting experiment similar to Vinyals, Bengio, and Kudlur (2015) on arrays with a length \(s\) (controlled by a hyperparameter) containing numbers normalized to \([-1;1]\). The network will receive an unordered array \(x\) and has to learn to output an ordered array \(y\).
# Dataset
SEQ_LENGTH = 5
NUM_SAMPLES = 2000
# Model
ITEM_SIZE = 1
EMBEDDING_SIZE = 32
HIDDEN_SIZE = 32
BATCH_SIZE = 256
PROCESS_STEPS = 5 # RPW model
# Training
LR = 0.01
N_EPOCHS = 250class DigitSortDataset(Dataset):
def __init__(self, num_samples, seq_length):
self.num_samples = num_samples
self.seq_length = seq_length
self.data = self.generate_data()
def generate_data(self):
data = []
for _ in range(self.num_samples):
sequence = [random.random() for _ in range(self.seq_length)]
unsorted = torch.tensor(sequence, dtype=torch.float32)
sorted_seq = torch.sort(unsorted)[0]
data.append((unsorted, sorted_seq))
return data
def __len__(self):
return self.num_samples
def __getitem__(self, idx):
return self.data[idx]# Create the datasets
train_val_dataset = DigitSortDataset(num_samples=NUM_SAMPLES, seq_length=SEQ_LENGTH)
# Split the train_val_dataset
train_size = int(0.8 * len(train_val_dataset))
val_size = len(train_val_dataset) - train_size
train_dataset, val_dataset = random_split(
train_val_dataset, [train_size, val_size]
)
# Create DataLoaders
train_loader = DataLoader(train_dataset, batch_size=BATCH_SIZE, shuffle=True)
val_loader = DataLoader(val_dataset, batch_size=BATCH_SIZE)For the rest of this article, we will be using arrays with \(s=5\), but the reader can adjust this value in the Jupyter Notebook. An example for a training pair \((x,y)\) from the data loader looks as follows:
Example x: tensor([0.8946, 0.3203, 0.5510, 0.4022, 0.6636])
Example y: tensor([0.3203, 0.4022, 0.5510, 0.6636, 0.8946])As a final step for the setup, we will define a few functions which will be used to train and evaluate the models in the next few sections. You can ignore these functions for now, but if you’re interested in how they work, you can unfold the code-blok below.
def train(model, dataloader, use_cross_entropy):
criterion = nn.CrossEntropyLoss() if use_cross_entropy else nn.MSELoss()
optimizer = optim.Adam(model.parameters(), lr=LR)
model.train()
total_loss = 0
for epoch in range(N_EPOCHS):
total_loss = 0
for batch in dataloader:
unsorted, sorted_seq = batch
prediction = model(unsorted)
if use_cross_entropy: # cross entropy if target are indices
_, indices = torch.sort(unsorted, dim=-1)
target = torch.argsort(indices, dim=-1)
else: # MSE if target are values
target = sorted_seq
loss = criterion(prediction, target)
# Backward pass and optimize
optimizer.zero_grad()
loss.backward()
optimizer.step()
total_loss += loss.item()
final_loss = total_loss / len(dataloader)
return model, final_loss
def probs_to_x(probabilities, unsorted_sequence):
indices = torch.argmax(probabilities, dim=-1) # Shape: [255, 5]
batch_size, seq_len = unsorted_sequence.shape
batch_indices = torch.arange(batch_size).unsqueeze(1).expand(-1, seq_len)
return unsorted_sequence[batch_indices, indices] # Shape: [255, 5]
def evaluate(model, dataloader):
model.eval()
n = 0
n_right = 0
total_divergence = 0
with torch.no_grad():
for batch in dataloader:
unsorted, sorted_seq = batch
output = model(unsorted)
if len(output.shape) == 3:
prediction = probs_to_x(output, unsorted)
else:
prediction = output
total_divergence += (sorted_seq - prediction).abs().sum().item()
n_right += (sorted_seq == prediction).sum().item()
n += sorted_seq.size(0) * sorted_seq.size(1)
accuracy = f"{((n_right / n) * 100):.2f}%"
avg_divergence = total_divergence / n
return accuracy, avg_divergence
def report_training_results(model_name, accuracy, divergence, embedding_size=EMBEDDING_SIZE):
"""Function report training results and hyperparameters in a table"""
data = {
'Metric': ['Model', 'Embedding Size', 'Sequence Length', 'Training Epochs', 'Accuracy', 'Avg. Divergence'],
'Value': [model_name, embedding_size, SEQ_LENGTH, N_EPOCHS, accuracy, divergence]
}
df = pd.DataFrame(data)
return df
def inspect(model, dataloader, is_pointer_network):
"""Function to look at model predictions / target values directly"""
model.eval()
batch = next(iter(dataloader))
unsorted, sorted_seq = batch
prediction = model(unsorted)
if is_pointer_network:
prediction = probs_to_x(prediction, unsorted)
results = [
{
'Example Nr.': i,
'Type': t,
'Values': ','.join(f'{x:.4f}' for x in seq[i].tolist())
}
for i in [0, 5, 10]
for t, seq in zip(['input', 'prediction', 'target'], [unsorted, prediction, sorted_seq])
]
return pd.DataFrame(results)
def visualize_divergence(df):
unique_examples = df['Example Nr.'].unique()
example_index = unique_examples[0]
df_example = df[df['Example Nr.']==example_index]
arr_input = np.array([float(value) for value in df_example[df_example['Type'] == 'input']['Values'].values[0].split(',')])
arr_prediction = np.array([float(value) for value in df_example[df_example['Type'] == 'prediction']['Values'].values[0].split(',')])
arr_target = np.array([float(value) for value in df_example[df_example['Type'] == 'target']['Values'].values[0].split(',')])
arr_divergence = arr_prediction - arr_target
indices = np.arange(len(arr_divergence))
bar_width = 0.95
fig, ax = plt.subplots(figsize=(6, 4))
bars = ax.bar(indices, arr_divergence, bar_width, color='royalblue', edgecolor='black', alpha=0.7)
ax.set_xlabel('Index in Array', fontsize=12)
ax.set_ylabel('Divergence', fontsize=12)
ax.set_title('Divergence per Index'.format(example_index), fontsize=13)
ax.legend(['Divergence'], loc='upper right')
ax.yaxis.grid(True, linestyle='--', alpha=0.7)
for bar in bars:
yval = bar.get_height()
ax.text(bar.get_x() + bar.get_width()/2, yval, round(yval, 2), ha='center', va='bottom', fontsize=10)
ax.set_ylim(min(arr_divergence) - 1, max(arr_divergence) + 1)
plt.tight_layout()
plt.show()Now we will introduce potential solutions to Set-to-Set problem1 introduced earlier.
1 In our case of sorting numbers, it would be more accurate to call it a Set-to-Seq problem, but we’ll use “Set-to-Set” in this articles to emphasize the non-sequential data.
As a baseline model, we will implement a feed-forward network with input- and output dimensions \(s\), which is one of the simplest types of neural networks (Bebis and Georgiopoulos 1994). The structure of the network consists of a single linear layer followed by a LeakyReLU activation function. We are using LeakyReLU because the input values can be positive and negative.
class LinearFF(nn.Module):
def __init__(self, s):
super().__init__()
self.l = nn.Linear(s, s, bias=False)
self.a = nn.LeakyReLU()
def forward(self, x):
return self.a(self.l(x))Training this model achieves the following results on our evaluation-set.
| Metric | Value | |
|---|---|---|
| 0 | Model | Feed-Forward |
| 1 | Embedding Size | None |
| 2 | Sequence Length | 5 |
| 3 | Training Epochs | 250 |
| 4 | Accuracy | 0.00% |
| 5 | Avg. Divergence | 0.095851 |
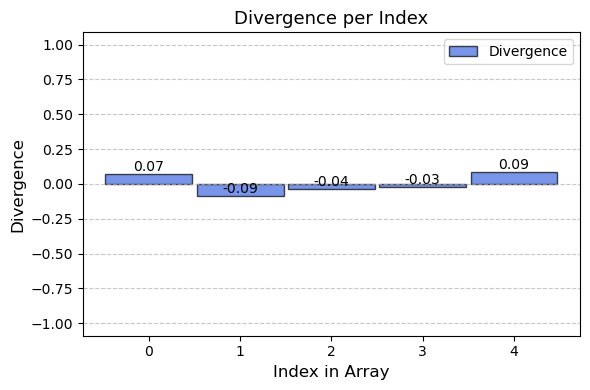
The evaluation of our model shows an accuracy score of 0%, mainly because the model struggles to predict Float32 values with full accuracy. As the accuracy metric alone doesn’t fully capture the model’s performance, we also calculated the average divergence as a complementary measure. This statistic reflects the positive or negative deviation of the model output from its corresponding target value at each index in the array.
Additionally, we will inspect a few samples from the evaluation set, combined with the model output.
| Example Nr. | Type | Values | |
|---|---|---|---|
| 0 | 0 | input | 0.0850,0.4038,0.4878,0.6103,0.6019 |
| 1 | 0 | prediction | 0.1571,0.3136,0.4480,0.5758,0.6981 |
| 2 | 0 | target | 0.0850,0.4038,0.4878,0.6019,0.6103 |
| 3 | 5 | input | 0.5476,0.8797,0.8482,0.5416,0.5308 |
| 4 | 5 | prediction | 0.2360,0.4701,0.6863,0.8853,1.0755 |
| 5 | 5 | target | 0.5308,0.5416,0.5476,0.8482,0.8797 |
| 6 | 10 | input | 0.9732,0.6948,0.5976,0.8599,0.2902 |
| 7 | 10 | prediction | 0.2506,0.4770,0.7003,0.8977,1.0958 |
| 8 | 10 | target | 0.2902,0.5976,0.6948,0.8599,0.9732 |
We can observe that the model seems to make reasonable predictions, but they are imprecise and often include made-up values which are not present in the input-array.
Based on the evaluation, we noticed two further disadvantages of the model architecture in addition to performance:
These limitations contribute to the suboptimal performance of the model and highlight the need to revise the architecture to improve efficiency and accuracy.
To find a solution to these problems, we have defined a Seq-to-Seq model using a recurrent architecture with an LSTM (Hochreiter and Schmidhuber 1997). It generates outputs autoregressive, meaning that the previous outputs from the model are used to produce the next output. Additionally, this autoregressive nature also allows us to process variable-sized inputs, eliminating both of the problems that the baseline feed-forward architecture in the previous section has.
The Seq-to-Seq architecture, consisting of encoder and decoder, is visualized in Figure 2
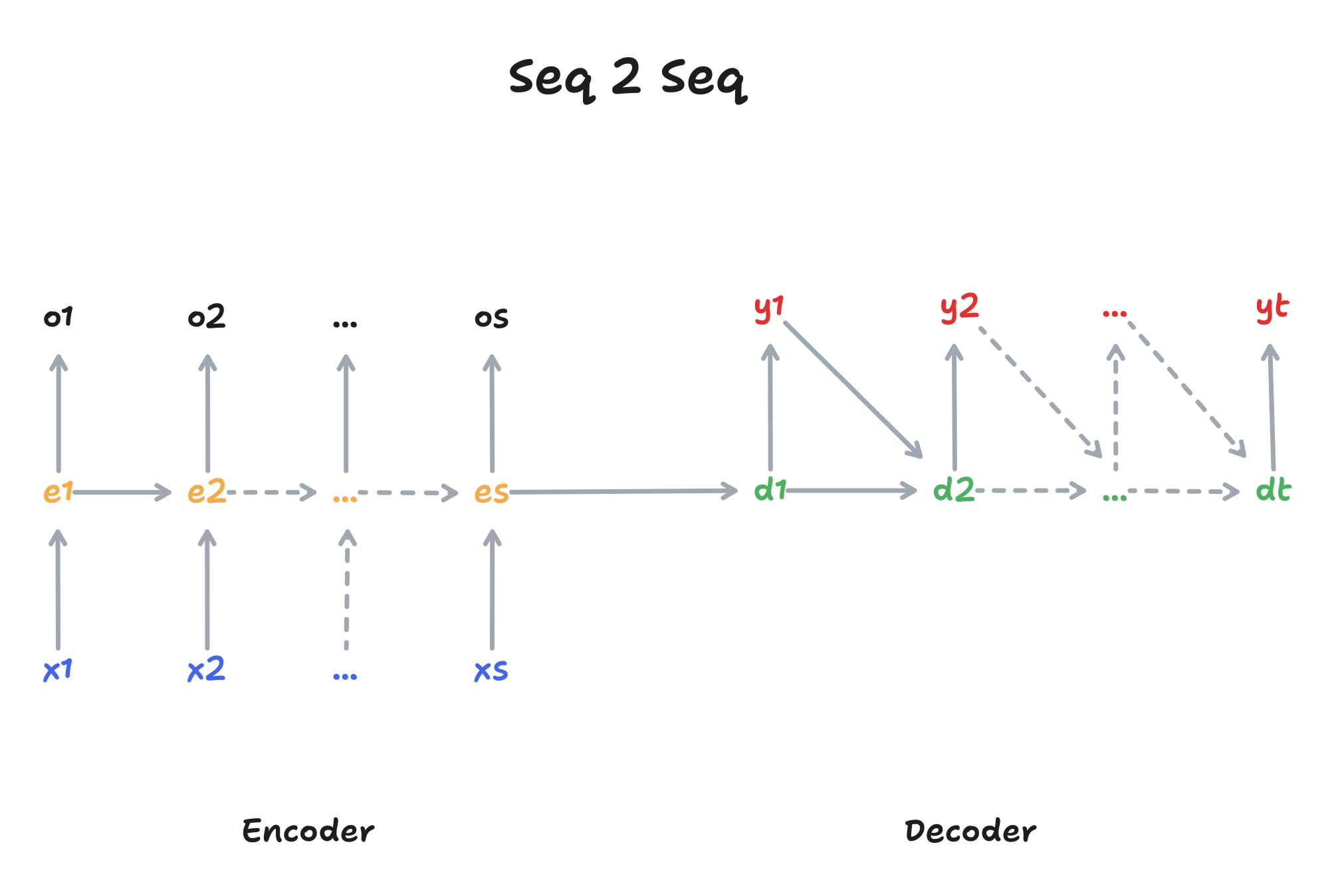
Before we can generate outputs, the model must analyze the entire input. This is why we use an encoder, which processes the entire input sequence \(x\) and then passes the hidden state \(e\) to the decoder as context. The decoder receives the context \(e\) from the encoder and uses it to generate the output \(y\) in an autoregressive manner.
Based on this architecture, we now define the model architecture in PyTorch.
class EncoderLstm(nn.Module):
def __init__(self, input_size, hidden_size):
super(EncoderLstm, self).__init__()
# LSTM
self.lstm_cell = nn.LSTMCell(input_size, hidden_size)
self.hidden_size = hidden_size
def forward(self, xs, h, c, s):
hs = []
for t in range(s):
1 xt = xs[:, t, :]
h, c = self.lstm_cell(xt, (h, c))
hs.append(h)
return torch.stack(hs, dim=1), (h, c)
class DecoderLstm(nn.Module):
def __init__(self, input_size, hidden_size, output_size):
super(DecoderLstm, self).__init__()
# Variables
self.input_size = input_size
self.hidden_size = hidden_size
self.output_size = output_size
# LSTM
self.lstm_cell = nn.LSTMCell(input_size, hidden_size)
# Output
self.fc = nn.Sequential(
nn.Linear(hidden_size, output_size),
nn.Sigmoid() # find out why this helps?
)
def forward(self, xs, h, c, s):
ys = []
yt = torch.zeros((xs.shape[0], self.output_size)) # SOS
for t in range(s):
2 h, c = self.lstm_cell(yt, (h, c))
3 yt = self.fc(h)
ys.append(yt)
return torch.stack(ys, dim=1).squeeze(-1)
class SeqToSeq(nn.Module):
def __init__(self, encoder, decoder):
super(SeqToSeq, self).__init__()
self.encoder = encoder
self.decoder = decoder
def forward(self, xs):
xs = xs.unsqueeze(-1)
b, s = xs.size()[0], xs.size()[1]
h, c = torch.zeros(b, self.encoder.hidden_size), torch.zeros(b, self.encoder.hidden_size)
hs, (h, c) = self.encoder(xs, h, c, s)
4 return self.decoder(hs, h, c, s)Afterward, we will use this architecture to train a new model.
| Metric | Value | |
|---|---|---|
| 0 | Model | LSTM |
| 1 | Embedding Size | None |
| 2 | Sequence Length | 5 |
| 3 | Training Epochs | 250 |
| 4 | Accuracy | 0.00% |
| 5 | Avg. Divergence | 0.025922 |
# echo: false
# inspect(model, val_loader, False)Looking at the evaluation results, we observe an accuracy score of 0%, indicating that the precision problem of the Feed-Forward network (see Section 3.1) has not yet been resolved. However, the average divergence is improving, suggesting the Seq-to-Seq architecture had a positive effect on the performance.
To improve the accuracy of the model, a logical next step would is to improve the input encoding via embeddings, instead of using the values as direct input to the model. Typically, an embedding layer can be implemented by a simple linear layer without bias and without an activation function.
class Embedder(nn.Module):
def __init__(self, embedding_size):
super().__init__()
self.lin = nn.Linear(1, embedding_size, bias=False)
def forward(self, xs):
return self.lin(xs)To use this Embedder module in the previously defined Seq-to-Seq module, we will integrate it there.
class SeqToSeq(nn.Module):
def __init__(self, encoder, decoder, embedder=None):
super(SeqToSeq, self).__init__()
self.embedder = embedder
self.encoder = encoder
self.decoder = decoder
def forward(self, xs):
xs = xs.unsqueeze(-1)
b, s = xs.size()[0], xs.size()[1]
h, c = torch.zeros(b, self.encoder.hidden_size), torch.zeros(b, self.encoder.hidden_size)
1 es = self.embedder(xs) if self.embedder else xs
2 hs, (h, c) = self.encoder(es, h, c, s)
return self.decoder(hs, h, c, s)| Metric | Value | |
|---|---|---|
| 0 | Model | LSTM + Embeddings |
| 1 | Embedding Size | 32 |
| 2 | Sequence Length | 5 |
| 3 | Training Epochs | 250 |
| 4 | Accuracy | 0.00% |
| 5 | Avg. Divergence | 0.015684 |
By using embeddings, we can observe a continuous decrease in the average divergence.
Although the average divergence is improving, it is still not optimal. A common problem of Seq-to-Seq models is, that the hidden state of the encoder-LSTM can become a bottleneck for the entire model (Vinyals, Bengio, and Kudlur 2015).
This problem can be addressed using an attention-mechanism (Graves, Wayne, and Danihelka 2014), where we not only pass the hidden state \(h\) and the cell state \(c\) to the decoder, but also include additional information from the original input sequence. This allows the decoder to analyze and weight the input sequences again before making predictions for the outputs.
Foremost, we would like to emphasize that there are different types of attentional mechanisms (Graves, Wayne, and Danihelka 2014). In this article, we will only focus on content based, specifically additive attention. For those interested in exploring other types of attention, additional resources are provided below.
The following diagram displays how content-based attention is integrated in the encoder-decoder architecture.
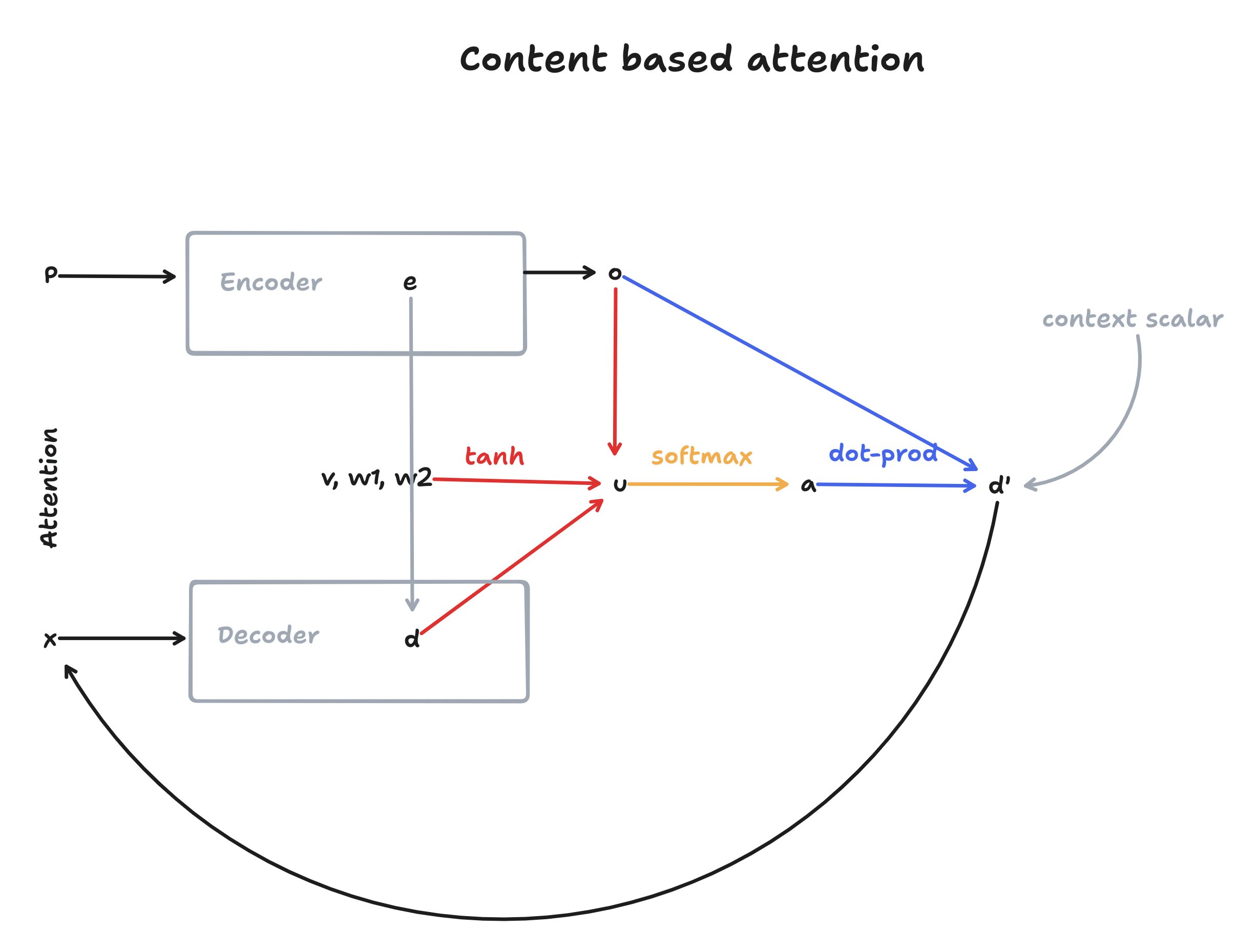
To understand what’s going on, we will first introduce the basics of content-based attention. Here, we will re-use the following variables from Figure 2:
Content-based attention as defined by Vinyals, Fortunato, and Jaitly (2015) consists of three steps2: First, we calculate a similarity-score \(u\) between the encoder outputs \(o\) and the decoder hidden states \(d\). Each of these scores indicates the relevance of a specific encoder output to the current decoder state.
2 We use the same notation as in the paper here, with slight modifications
\[ u_j = v^T \tanh(W_1 o_j + W_2 d) \tag{1}\]
In a second step, the softmax-function is applied to the attention-score, resulting in the attentions-weights \(a\).
\[a_j = \operatorname{softmax}(u_j) \tag{2}\]
Finally, a context is calculated using the attention-weights \(a\) and the encoder outputs \(o\).
\[d' = \sum_{j=1}^n a_j o_j \tag{3}\]
By summing these values, we obtain our new hidden state \(d'\) for the decoder, which has now been enhanced with additional knowledge about the input sequence.
Going back to Figure 3, Equation 1 is displayed in red, Equation 2 in orange and Equation 3 in blue. We can see that without attention (grey colors), the decoder would be limited to the information provided in the encoder hidden state \(e\). But by using attention, the decoder can include information about the entire input sequence by comparing its own hidden state \(d\) to the encoder outputs \(o\) at each step while generating outputs. This should mitigate the bottleneck problem discussed in earlier sections (see Section 3.2).
We will now proceed by implementing the attention-mechanism in PyTorch.
class AdditiveAttention(nn.Module):
def __init__(self, key_size, query_size):
super(AdditiveAttention, self).__init__()
self.w1 = nn.Linear(key_size, query_size, bias=False)
self.w2 = nn.Linear(query_size, query_size, bias=False)
self.v = nn.Linear(query_size, 1, bias=False)
self.compress = nn.Sequential(
nn.Linear(query_size * 2, query_size),
nn.Tanh()
)
def forward(self, key, query, create_context, compress_context=False):
1 u = self.v(torch.tanh(self.w1(key) + self.w2(query).unsqueeze(1))).squeeze(-1)
2 a = F.softmax(u, dim=1)
if create_context:
3 r = torch.bmm(a.unsqueeze(1), key).squeeze(1)
concat = torch.cat([query, r], dim=1)
context = self.compress(concat) if compress_context else concat
return context
else:
return aPlease ignore the concat and compress steps for now. These are used in the Read-Process-Write architecture introduced in the following sections.
Finally, we will integrate the attention module into the decoder.
class DecoderLstm(nn.Module):
def __init__(self, input_size, hidden_size, output_size, use_attention):
super(DecoderLstm, self).__init__()
# Variables
self.input_size = input_size
self.hidden_size = hidden_size
self.output_size = output_size
# LSTM
self.lstm_cell = nn.LSTMCell(input_size, hidden_size)
# Attention
1 self.attention = AdditiveAttention(hidden_size, hidden_size) if use_attention else None
# Output
self.fc = nn.Sequential(
nn.Linear(hidden_size, output_size),
nn.Sigmoid() # find out why this helps?
)
def forward(self, xs, h, c, s):
ys = []
yt = torch.zeros((xs.shape[0], self.output_size)) # SOS
for t in range(s):
h, c = self.lstm_cell(yt, (h, c))
if self.attention:
2 context = self.attention(xs, h, create_context=True, compress_context=True)
yt = self.fc(context)
else:
yt = self.fc(h)
ys.append(yt)
return torch.stack(ys, dim=1).squeeze(-1)Using this architecture, we will now train and evaluate an attention-based Seq-to-Seq model on the training data.
| Metric | Value | |
|---|---|---|
| 0 | Model | LSTM + Embeddings + Attention |
| 1 | Embedding Size | 32 |
| 2 | Sequence Length | 5 |
| 3 | Training Epochs | 250 |
| 4 | Accuracy | 0.00% |
| 5 | Avg. Divergence | 0.010806 |
We can observe that the addition of the attention mechanism significantly reduces the average divergence, which indicates that the bottleneck-problem of the hidden state is being alleviated.
As previously outlined, the issue of the hidden state bottleneck was addressed through the introduction of attention. Nevertheless, this does not address the issue of precision (see Section 3.1): The problem arises because the network attempts to predict values in the ordered array directly, however because these are Float32 values, it is highly unlikely that the network will be able to output it in full precision.
To address this issue, we can modify the model to predict indices of the ordered array, instead of values: This means that we will train a model that understands how to rank items without needing to predict exact output values, thereby resolving the precision problem. This idea is known as a pointer network (Vinyals, Fortunato, and Jaitly 2015) and we will implement it in this section.
Implementing a pointer network is actually a simplified model of the content-based attention Seq-to-Seq model from Section 3.4. The diagram below displays the Seq-to-Seq architecture using a pointer network as a decoder.
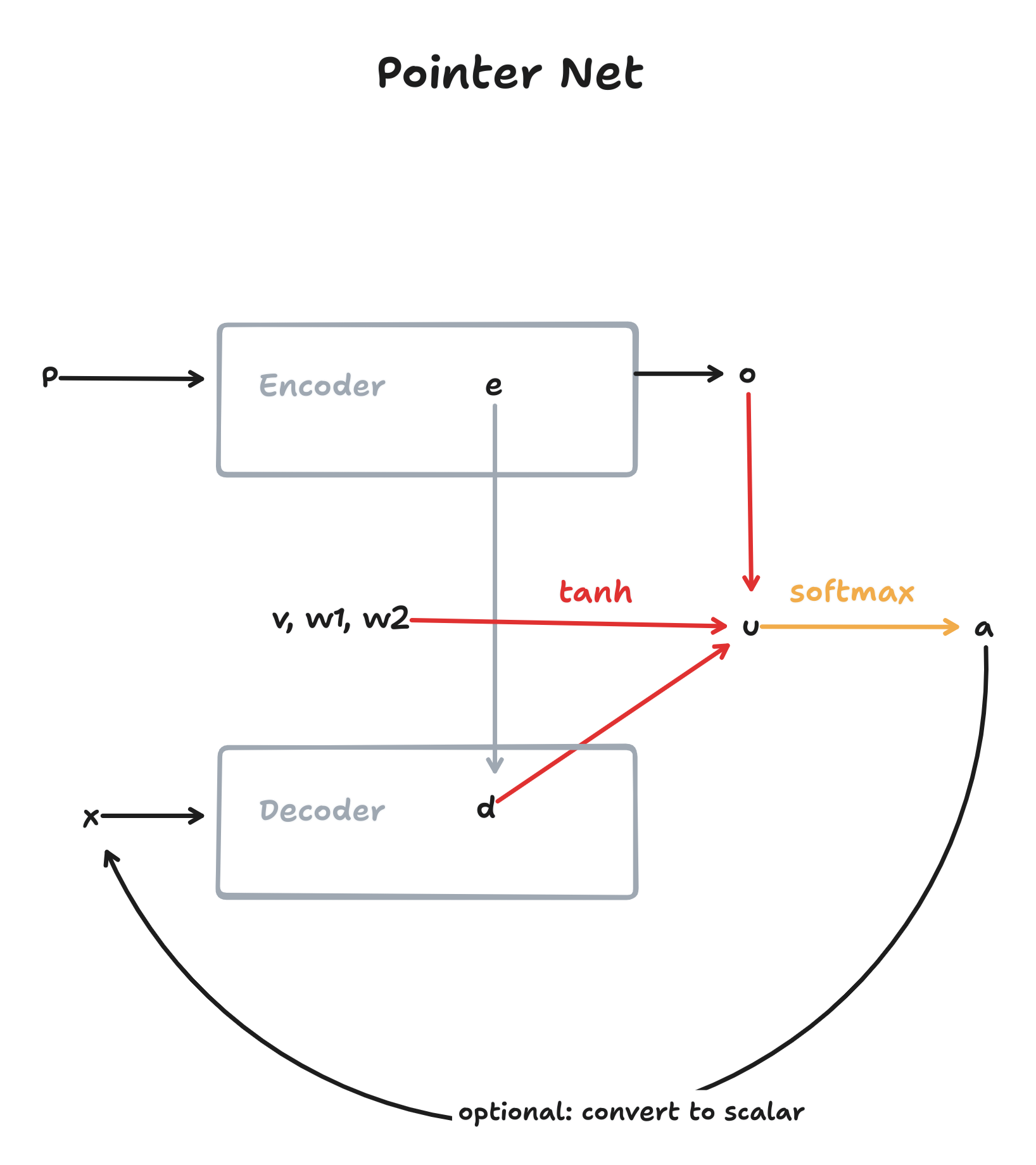
The pointer network is essentially content-based attention, but without calculating a context (Equation 3) and instead using the attention-weights (see Equation 2) as outputs. These attention-weights are a distribution over the input-vocabulary and can therefore serve as “pointers” to the input vocabulary. To use this distribution as a hidden-state for subsequent steps, we simply do a matrix multiplication with this distribution to convert it into a scalar-value.
class DecoderPointerLstm(nn.Module):
def __init__(self, hidden_size, use_attention):
super(DecoderPointerLstm, self).__init__()
# LSTM
self.lstm_cell = nn.LSTMCell(hidden_size, hidden_size)
# Attention
self.attention = AdditiveAttention(hidden_size, hidden_size) if use_attention else None
self.hidden_size = hidden_size
def forward(self, xs, h, c, s):
ys = []
yt = torch.zeros((xs.shape[0], self.hidden_size)) # SOS
for t in range(s):
h, c = self.lstm_cell(yt, (h, c))
# now returns a softmax distribution
1 p = self.attention(xs, h, create_context=False)
ys.append(p)
# compile next input
# this could also be just the pointer distribution, but would restrict
# the model to a specific sequence length (not generalizable) so we compile
# a new state from it
2 yt = torch.bmm(p.unsqueeze(1), xs).squeeze(1)
return torch.stack(ys, dim=1)Using this new architecture, we will train and evaluate a pointer-net based Seq-to-Seq model.
| Metric | Value | |
|---|---|---|
| 0 | Model | LSTM + Embeddings + Attention + Pointer |
| 1 | Embedding Size | 32 |
| 2 | Sequence Length | 5 |
| 3 | Training Epochs | 250 |
| 4 | Accuracy | 93.05% |
| 5 | Avg. Divergence | 0.00228 |
The results improve significantly with the addition of the pointer mechanism: Not only is the accuracy metric working, indicating that we have solved the precision problem, but also the average divergence is decreasing as a side effect of the model predicting more precise values.
Comparing the model output with the target values directly (see Table 6), it is difficult to find wrong outputs due to the high accuracy. However, we can observe that when the model makes a mistake, the resulting value is still guaranteed to be present in the input array, due to the pointer mechanism.
| Example Nr. | Type | Values | |
|---|---|---|---|
| 0 | 0 | input | 0.0850,0.4038,0.4878,0.6103,0.6019 |
| 1 | 0 | prediction | 0.0850,0.4038,0.4878,0.6019,0.6103 |
| 2 | 0 | target | 0.0850,0.4038,0.4878,0.6019,0.6103 |
| 3 | 5 | input | 0.5476,0.8797,0.8482,0.5416,0.5308 |
| 4 | 5 | prediction | 0.5416,0.5476,0.5476,0.8482,0.8797 |
| 5 | 5 | target | 0.5308,0.5416,0.5476,0.8482,0.8797 |
| 6 | 10 | input | 0.9732,0.6948,0.5976,0.8599,0.2902 |
| 7 | 10 | prediction | 0.2902,0.5976,0.6948,0.8599,0.9732 |
| 8 | 10 | target | 0.2902,0.5976,0.6948,0.8599,0.9732 |
The Seq-to-Seq architecture combined with a pointer network already achieves good results. However, there is an important observation to be made: The Seq-to-Seq architecture is reading the inputs sequentially and generating outputs sequentially (see Figure 2). As a result, the order in which the input array is presented has an effect on the performance of the model because it changes the encoding. This property can be advantageous when dealing with sequential data, but not for Set2Set. Sets, by definition lack order and thus every set should be encoded identically (see Vinyals, Bengio, and Kudlur (2015)).
Read-Process-Write Architecture, introduced by Vinyals, Bengio, and Kudlur (2015) addresses this problem by using an order invariant encoding via content-based attention in the encoder and a glimpse mechanism in the decoder for order invariant decoding.
Compared to the previous sections, we will now continue with the notation from Vinyals, Bengio, and Kudlur (2015) with slight modifications so that the reader can easily compare our implementation to the paper.
Figure 5 displays the Read-Process-Write architecture, excluding the glimpse mechanism, which will be described in a following section.
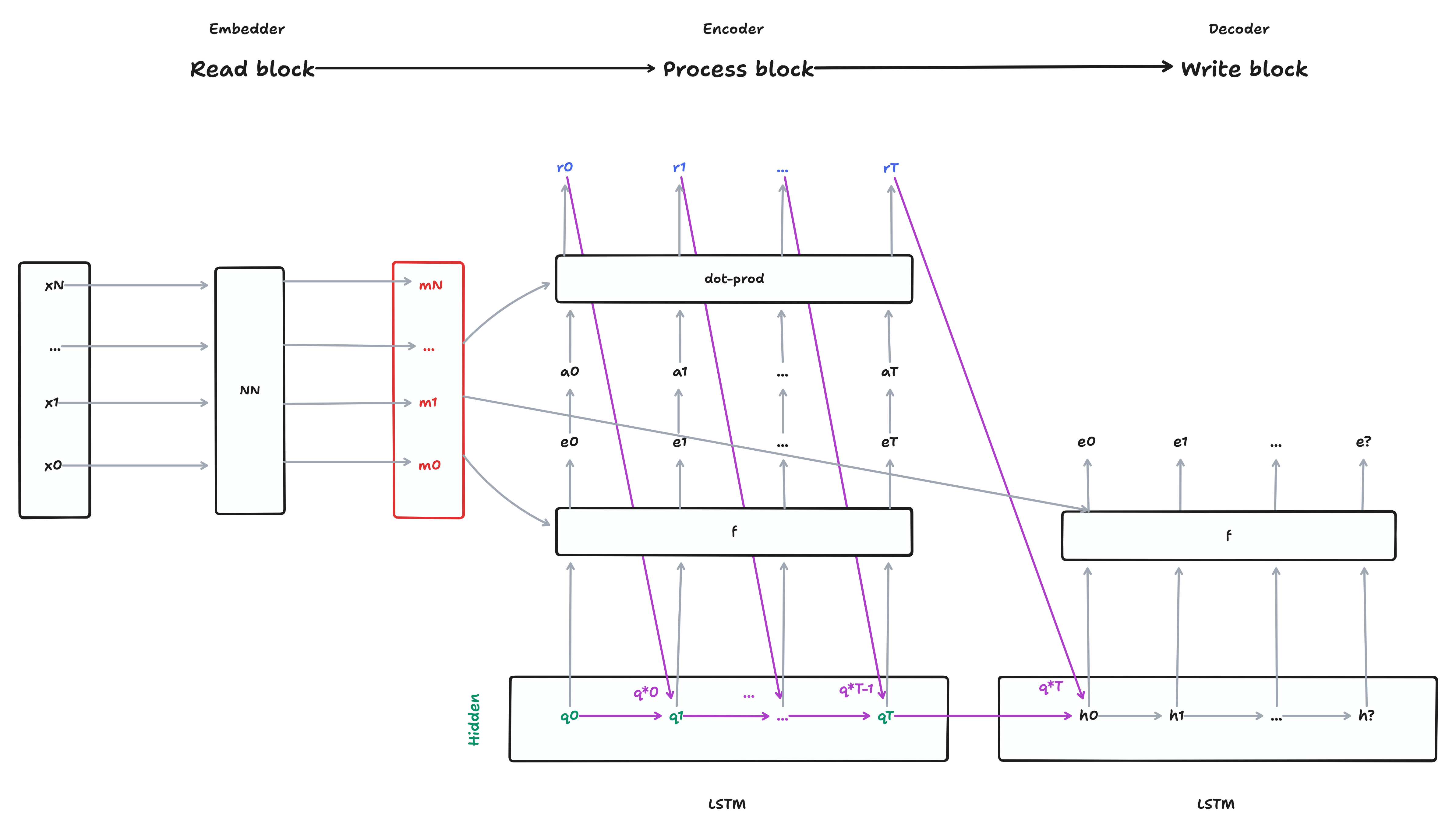
Although this diagram is more verbose than Figure 2, in essence the Read-Process-Write architecture can be understood as an Encoder-Decoder model with embeddings. In fact, in our implementation, we use the same embedder introduced in Section 3.3 for this model. The encoder is called the Process block and the main difference to the Seq-toSeq encoder from Figure 2 is, that it can “see” the input sequence \(m\) only via an attention mechanism, instead of as input into the LSTM, resulting in an order invariant encoding. As a side effect, we can now also specify how many process steps we want to take, potentially even more than the sequence length \(s\) of the input array 3.
3 In our implementation we’re using 5 processing steps, but these can be adjusted as seen fit
class ProcessEncoderLstm(nn.Module):
def __init__(self, input_size, hidden_size):
super(ProcessEncoderLstm, self).__init__()
# LSTM
self.lstm_cell = nn.LSTMCell(hidden_size * 2, hidden_size)
# Attention
self.attention = AdditiveAttention(key_size=input_size, query_size=hidden_size)
def forward(self, ms, q_star, h, c, process_steps):
1 for t in range(process_steps):
2 q, c = self.lstm_cell(q_star, (h, c))
3 q_star = self.attention(ms, q, create_context=True)
return q_starAs shown in Figure 5, \(q^*\) from the Process block is used to initialize the Write block. The Write block is mostly identical to the decoder pointer-network introduced in Section 3.5, with the addition of a glimpse-mechanism, which was also introduced by Vinyals, Bengio, and Kudlur (2015). Glimpse is another content-based attention module which is calculated from \(q^*\) and the memory vector \(m\). The glimpse-value \(g\) is then passed as input \(x\) and \(q^*\) as the hidden state \(h\) to the LSTM. Although the authors only briefly describe the design-decision behind this mechanism, it increases the performance of the model significantly. While the decoder in the Seq-to-Seq architecture was able to rely on its previous outputs as inputs \(x\) for the following steps, in a non-sequential setting as in Set-to-Set, this is not the case, and the glimpse value \(g\) serves as a non-sequential replacement for it.
class WriteDecoderPointerLstm(nn.Module):
def __init__(self, input_size, hidden_size):
super(WriteDecoderPointerLstm, self).__init__()
# LSTM
self.lstm_cell = nn.LSTMCell(input_size, hidden_size)
self.input_size = input_size
# Attention
self.attention = AdditiveAttention(key_size=input_size, query_size=hidden_size)
self.hidden_size = hidden_size
# Glimpse
1 self.glimpse = AdditiveAttention(key_size=input_size, query_size=input_size)
2 self.glimpse_projection = nn.Linear(hidden_size, input_size)
def forward(self, m, h, c, s):
ys = []
for t in range(s):
# glimpse
# h = q_star (from process-block)
3 g = self.glimpse(m, self.glimpse_projection(h), create_context=True, compress_context=True)
h, c = self.lstm_cell(g, (h, c))
# returns softmax
y = self.attention(m, h, create_context=False)
ys.append(y)
return torch.stack(ys, dim=1)To combine the Read, Process and Write modules into a single model, we will introduce the RPW class using pytorch.
class ProcessBlock(nn.Module):
def __init__(self, input_size, hidden_size):
super().__init__()
self.module = ProcessEncoderLstm(input_size=input_size, hidden_size=hidden_size)
self.hidden_size = hidden_size
def forward(self, ms, s):
bs = ms.size(0)
q_star = torch.zeros(bs, self.hidden_size * 2)
h = torch.zeros(bs, self.hidden_size)
c = torch.zeros(bs, self.hidden_size)
return self.module(ms, q_star, h, c, s)
class WriteBlock(nn.Module):
def __init__(self, input_size, hidden_size):
super().__init__()
self.module = WriteDecoderPointerLstm(input_size=input_size, hidden_size=hidden_size * 2)
def forward(self, m, q_star):
bs, s = m.size(0), m.size(1)
c = torch.zeros(bs, self.module.hidden_size)
return self.module(m, q_star, c, s)
class RPW(nn.Module):
def __init__(self, embedding_size, hidden_size, process_steps):
super().__init__()
self.read = Embedder(embedding_size=embedding_size)
self.process = ProcessBlock(input_size=embedding_size, hidden_size=hidden_size)
self.write = WriteBlock(input_size=embedding_size, hidden_size=hidden_size)
self.process_steps = process_steps
def forward(self, xs):
xs = xs.unsqueeze(-1)
m = self.read(xs)
1 q_star = self.process(m, self.process_steps)
2 pointers = self.write(m, q_star)
return pointersFinally, we will train and evaluate a new model with this architecture.
| Metric | Value | |
|---|---|---|
| 0 | Model | Read-Process-Write (Pointer) |
| 1 | Embedding Size | 32 |
| 2 | Sequence Length | 5 |
| 3 | Training Epochs | 250 |
| 4 | Accuracy | 98.70% |
| 5 | Avg. Divergence | 0.00036 |
The results show almost perfect accuracy values and a very low divergence. This indicates that the order invariant encoding / decoding, which is implemented via content-based attention, improves the performance. With more processing steps and longer training time, this performance can be improved even further.
The Seq-to-Seq architecture is useful for processing sequential data of varying lengths, but faces challenges when dealing with unordered inputs or outputs. In this article, we highlight the strengths of the Read-Process-Write architecture, which is an extension of the classical Seq-to-Seq paradigm to a Set-to-Set paradigm, by building the final model from the ground up and comparing the performance improvements at each step. LSTMs are better at handling variable-length sequences than a baseline feed-forward networks (see Section 3.1), and can be combined into a Seq-to-Seq model with an encoder and decoder (see Section 3.2), potentially also using embeddings for improved performance (see Section 3.3). Incorporating an attention-mechanism can help to overcome the hidden-state bottleneck, significantly improving performance (see Section 3.4). The introduction of pointer networks, on the other hand, allows the model to be more accurate in its output, by predicting indices from the input vocabulary rather than the values directly (see Section 3.5). Finally, by processing the inputs for the encoder and decoder LSTM in a non-sequential manner via attention, the Read-Process-Write architecture (see Section 3.6) eliminates the sequential limitation of Seq-to-Seq models and results in a Set-to-Set architecture, which may be used to solve the problem of sorting numbers introduced in this article.